RealSense Depth Camera D435i Intel 기본
![]()
RealSense SDK Install
참고해서 설치하기
IntelRealSense.librealsense
sudo mkdir -p /etc/apt/keyrings
curl -sSf https://librealsense.intel.com/Debian/librealsense.pgp | sudo tee /etc/apt/keyrings/librealsense.pgp > /dev/null
echo "deb [signed-by=/etc/apt/keyrings/librealsense.pgp] https://librealsense.intel.com/Debian/apt-repo `lsb_release -cs` main" | \
sudo tee /etc/apt/sources.list.d/librealsense.list
sudo apt-get update
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
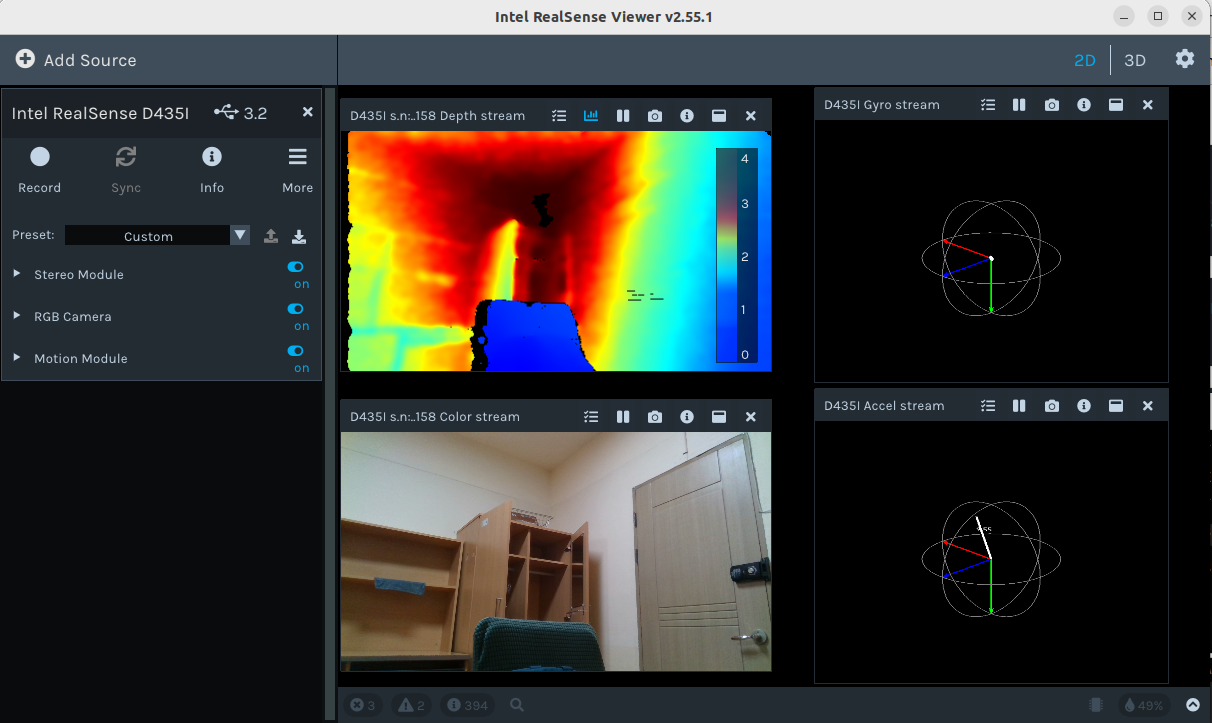
확인
realsense-viewer
RealSense ROS package Install
참고
IntelRealSense.realsense-ros
sudo apt install ros-humble-librealsense2*
sudo apt install ros-humble-realsense2-*
만약에 안되면 이것도 하고 (안해도 됨)
# sudo apt install ros-humble-diagnostic-*
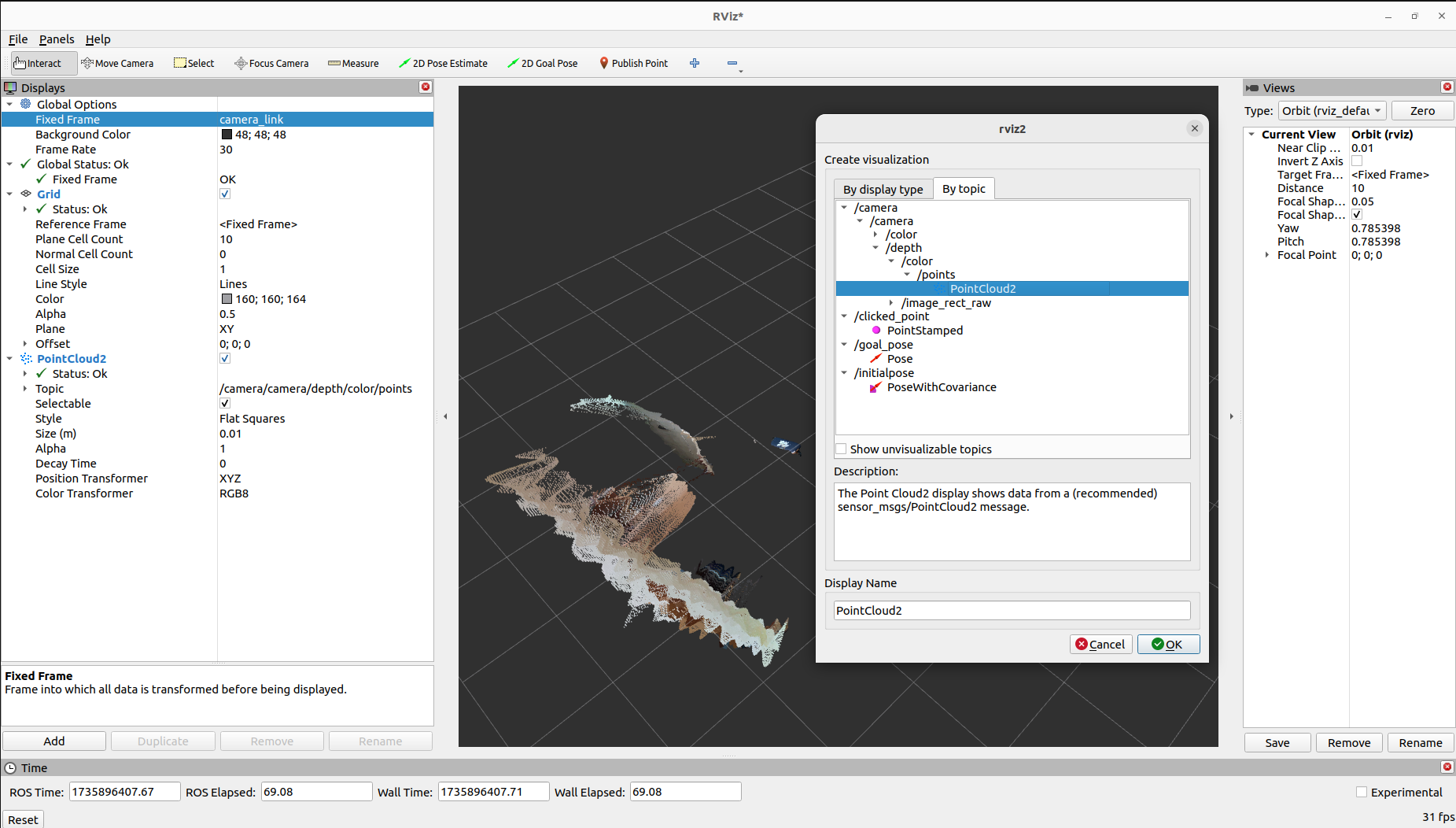
1번 터미널에서
ros2 launch realsense2_camera rs_launch.py depth_module.profile:=1280x720x30 pointcloud.enable:=true device_type:=d435
2번 터미널에서
rviz2
Opencv with Python
sudo apt install python3-pip
pip install opencv-python
pip install pyrealsense2
pip install numpy
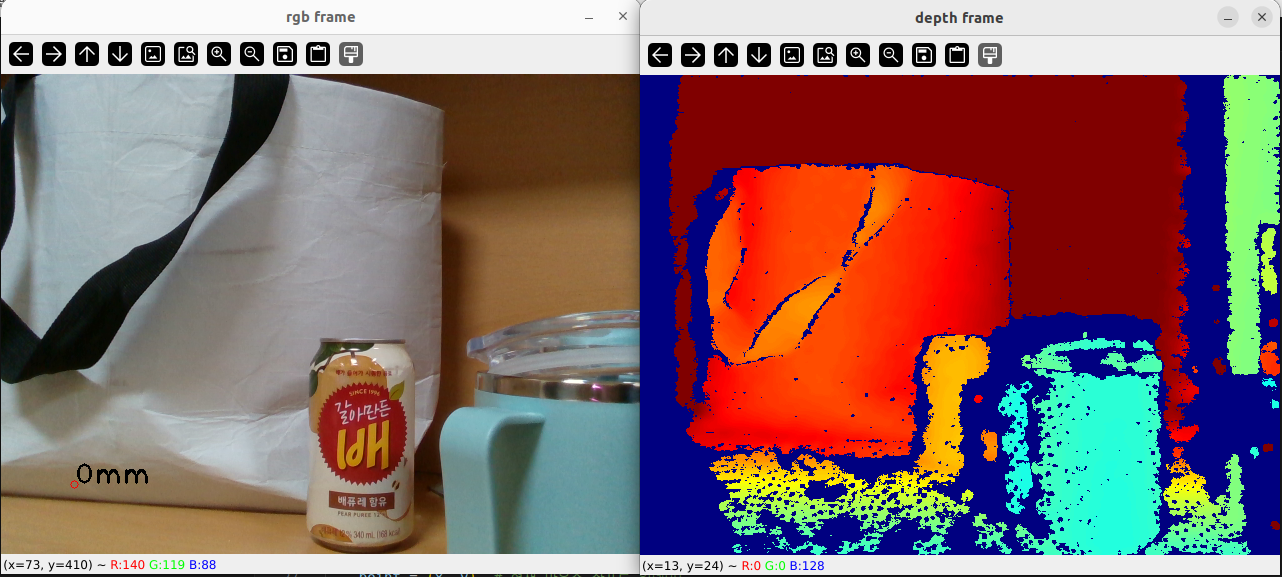
python으로 RealSense 연결
import pyrealsense2 as rs # Intel RealSense SDK 모듈
import numpy as np # 행렬 및 배열 계산을 위한 라이브러리
import cv2 # OpenCV 라이브러리, 이미지 처리 및 GUI 제공
# RealSense 파이프라인 초기화
pipe = rs.pipeline() # RealSense 데이터를 관리할 파이프라인 생성
cfg = rs.config() # 스트림 설정을 위한 구성 객체 생성
# 컬러 스트림 설정 (해상도: 640x480, 형식: BGR, FPS: 30)
cfg.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
# 깊이 스트림 설정 (해상도: 640x480, 형식: Z16, FPS: 30)
cfg.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
# 설정한 스트림으로 파이프라인 시작
pipe.start(cfg)
# 초기 포인트 설정 (화면 중앙 좌표)
point = (400, 300)
# 마우스 이벤트 콜백 함수
def show_distance(event, x, y, args, params):
"""
마우스 클릭 시 클릭한 위치 좌표를 업데이트
"""
global point
point = (x, y) # 현재 마우스 좌표로 업데이트
# OpenCV 창 생성 및 마우스 콜백 함수 등록
cv2.namedWindow("rgb frame") # 컬러 이미지를 표시할 창 생성
cv2.setMouseCallback("rgb frame", show_distance) # "rgb frame" 창에서 마우스 이벤트 처리
# 메인 루프
while True:
# 프레임 가져오기 (깊이 프레임과 컬러 프레임)
frame = pipe.wait_for_frames()
depth_frame = frame.get_depth_frame()
color_frame = frame.get_color_frame()
# 깊이 및 컬러 데이터를 NumPy 배열로 변환
depth_image = np.asanyarray(depth_frame.get_data())
color_image = np.asanyarray(color_frame.get_data())
# 깊이 이미지를 시각화하기 위해 컬러맵 적용
depth_cm = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.5), cv2.COLORMAP_JET)
# 현재 포인트에 빨간 원 그리기
cv2.circle(color_image, point, 4, (0, 0, 255)) # 포인트 좌표에 원 표시
print(point) # 현재 포인트 좌표 출력
# 깊이 값 가져오기 (현재 포인트의 깊이값)
distance = depth_image[point[1], point[0]] # y, x 순서로 접근
print(distance) # 깊이값 출력 (밀리미터 단위)
# 깊이값을 컬러 이미지에 텍스트로 표시
cv2.putText(
color_image,
"{}mm".format(distance), # 깊이값(mm 단위) 표시
(point[0], point[1]), # 텍스트 위치 (현재 포인트 좌표)
cv2.FONT_HERSHEY_PLAIN, # 폰트 스타일
2, # 폰트 크기
(0, 0, 0), # 텍스트 색상 (검정색)
2 # 텍스트 두께
)
# 컬러 이미지 및 깊이 이미지 표시
cv2.imshow('rgb frame', color_image) # 컬러 이미지 표시
cv2.imshow('depth frame', depth_cm) # 컬러맵이 적용된 깊이 이미지 표시
# 키 입력 대기: 'q'를 누르면 종료
if cv2.waitKey(1) == ord('q'):
break
# 파이프라인 정리 및 리소스 해제
pipe.stop()
Comments