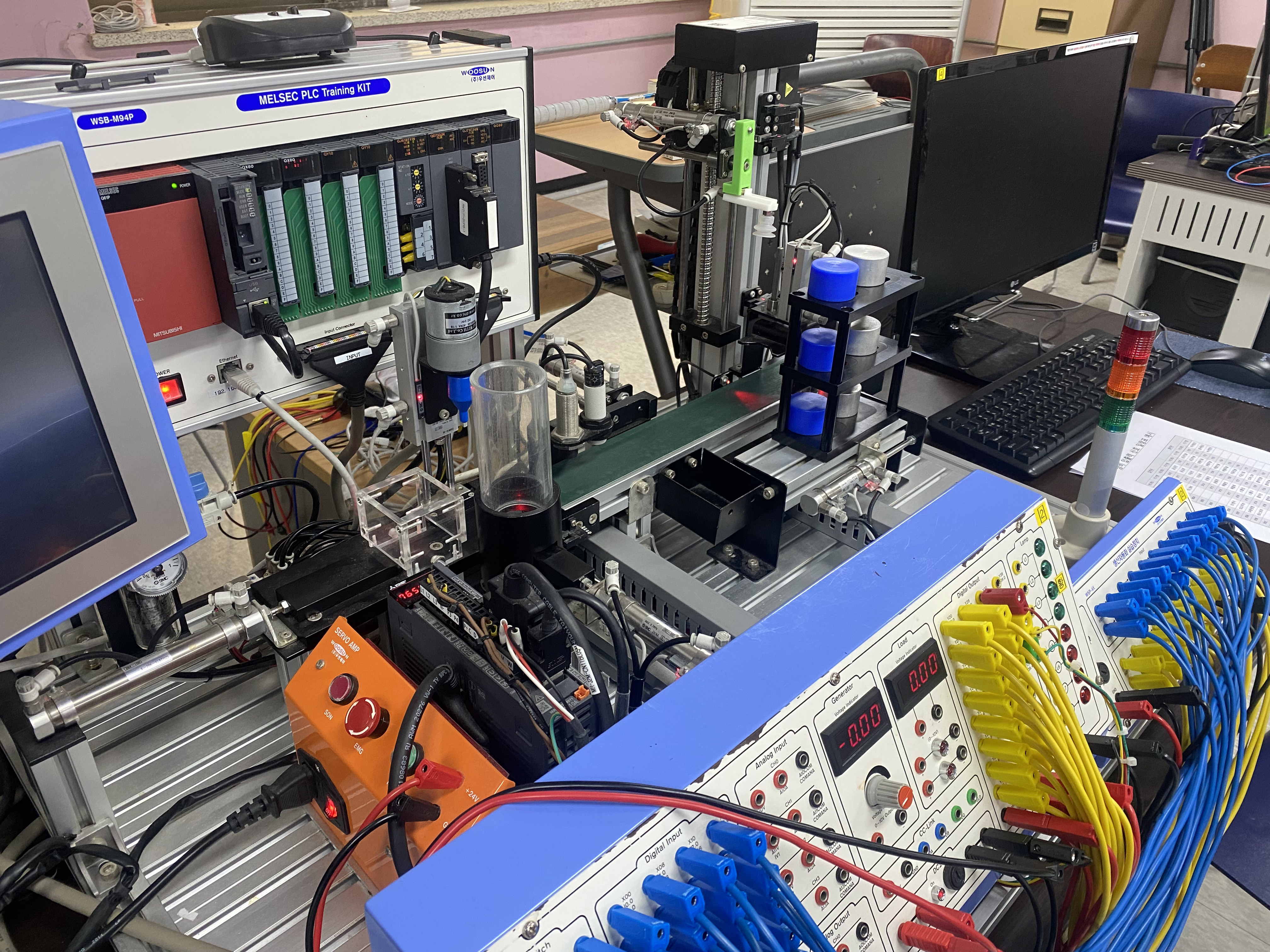
PLC 위치결정모듈
![]()
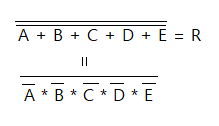
불대수법칙
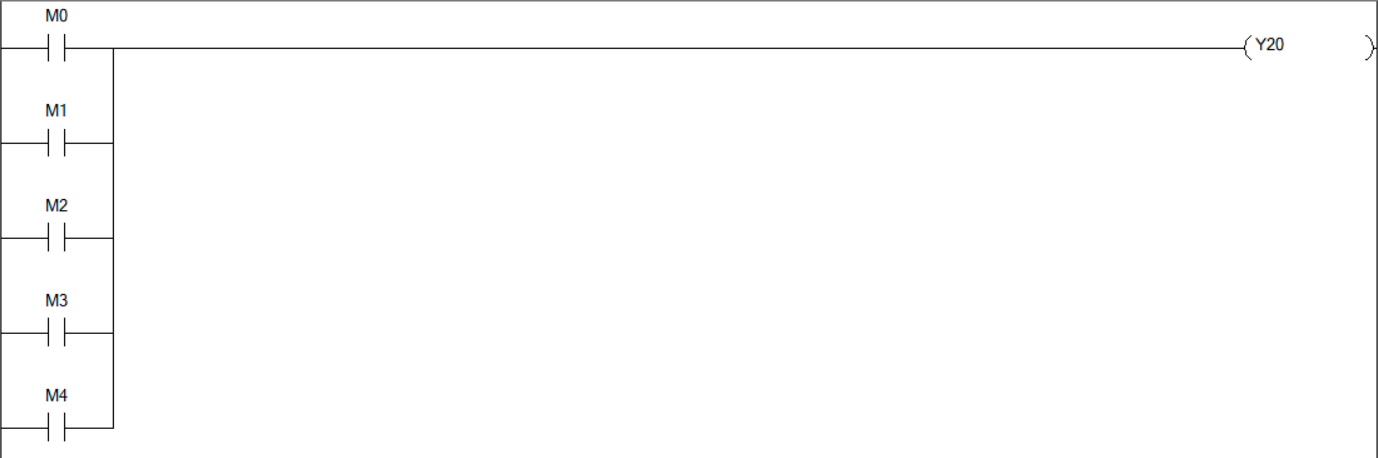
위의 프로그램과 아래의 프로그램은 같은 동작

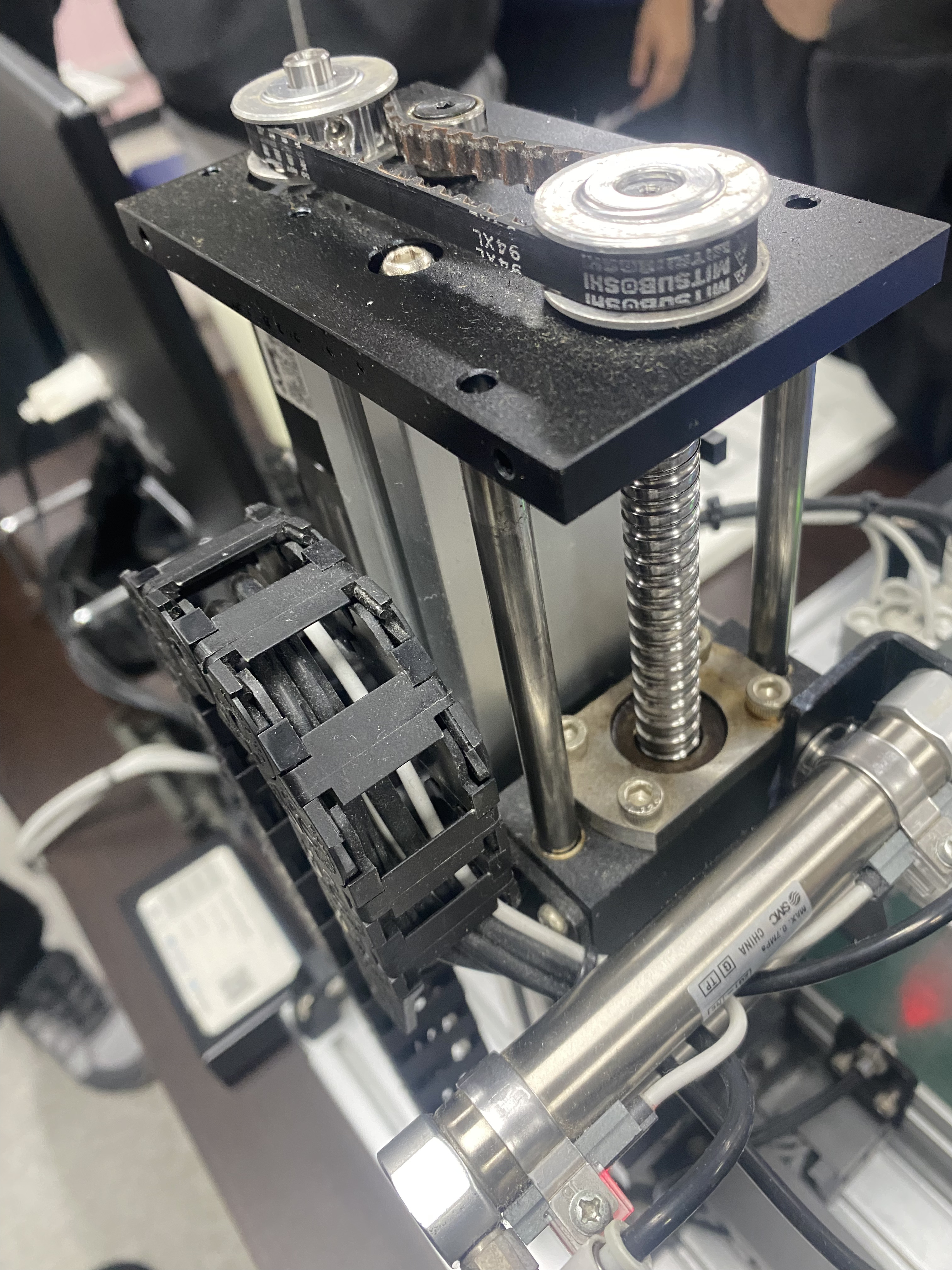
미쓰비시 모터
차동신호 -> OPAmp 동상신호제거 : 노이즈에 강하다
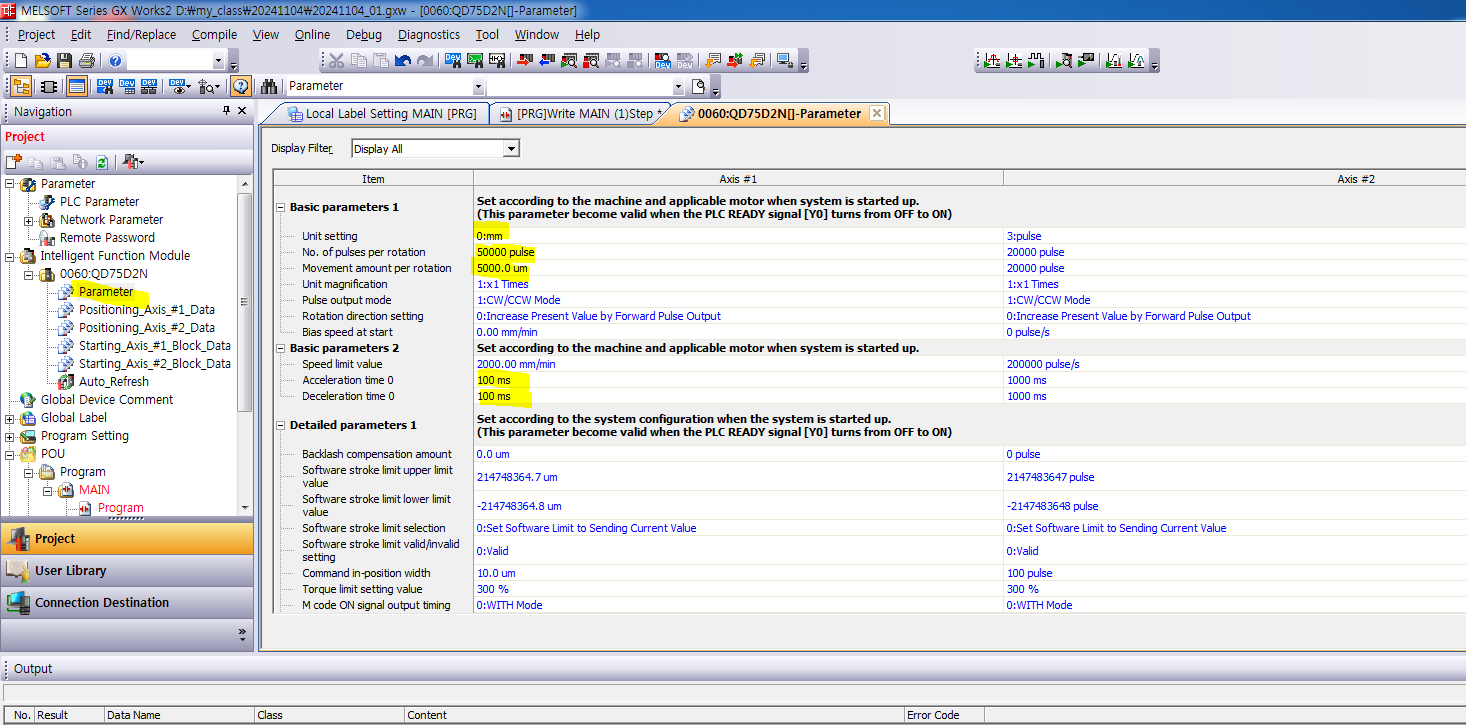
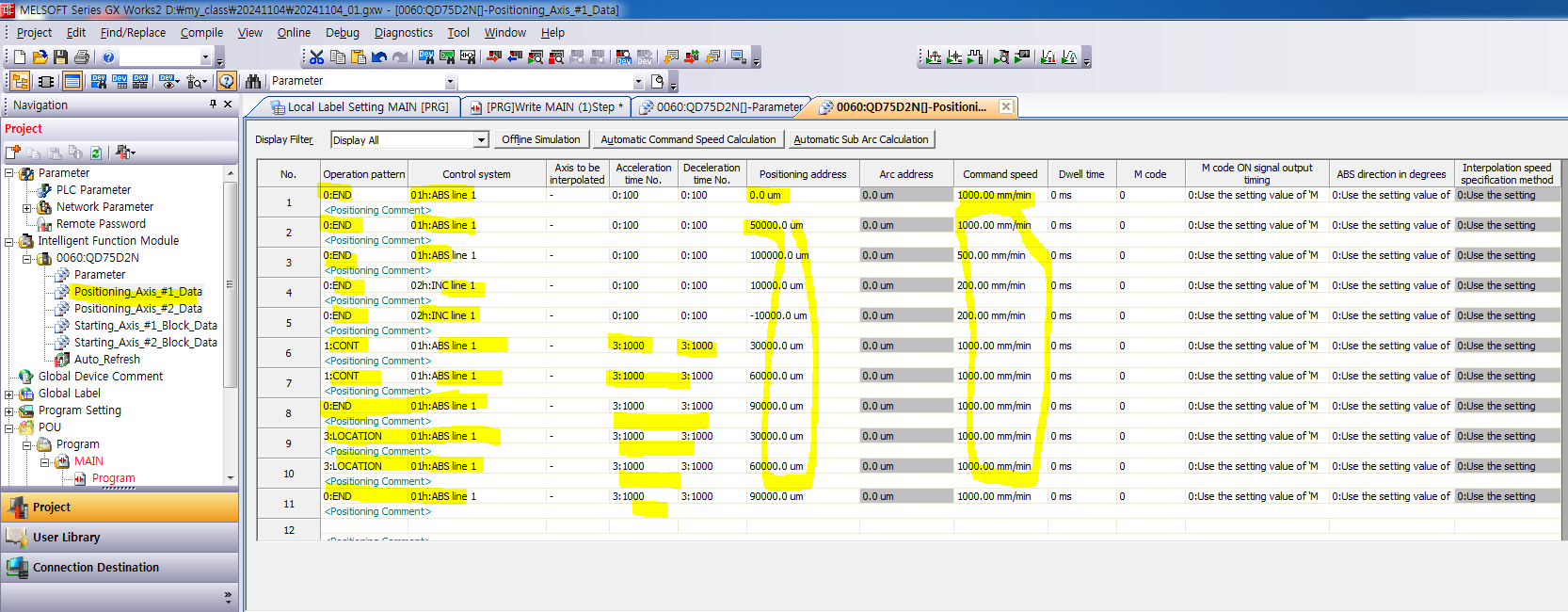
위치결정모듈
하한센서 : 정회전(반시계방향으로 밑으로)
도그센서 : 원점 정위치로 (포토 인터럽터) (Near-point Dog Method)
상한센서 : 역회전(시계방향으로 위로)
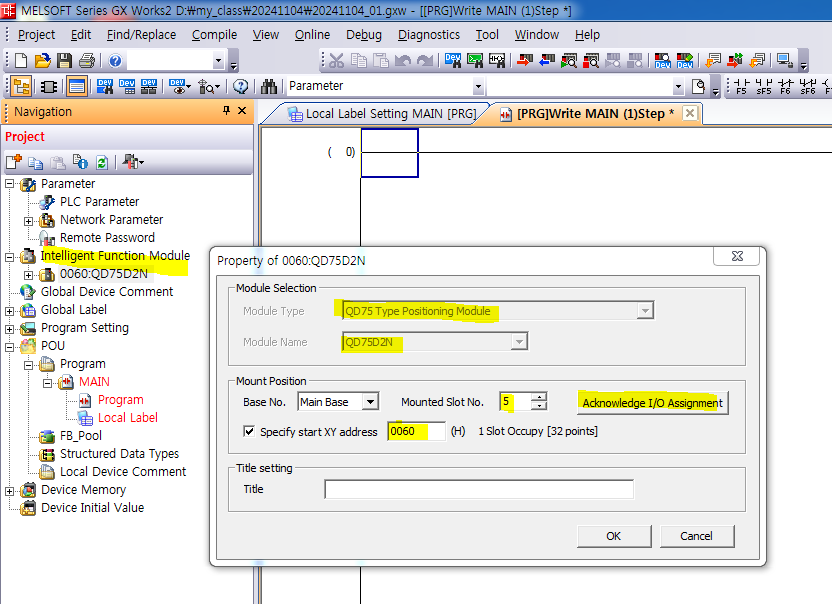
모듈 생성
Intelligent Function Module > New Module
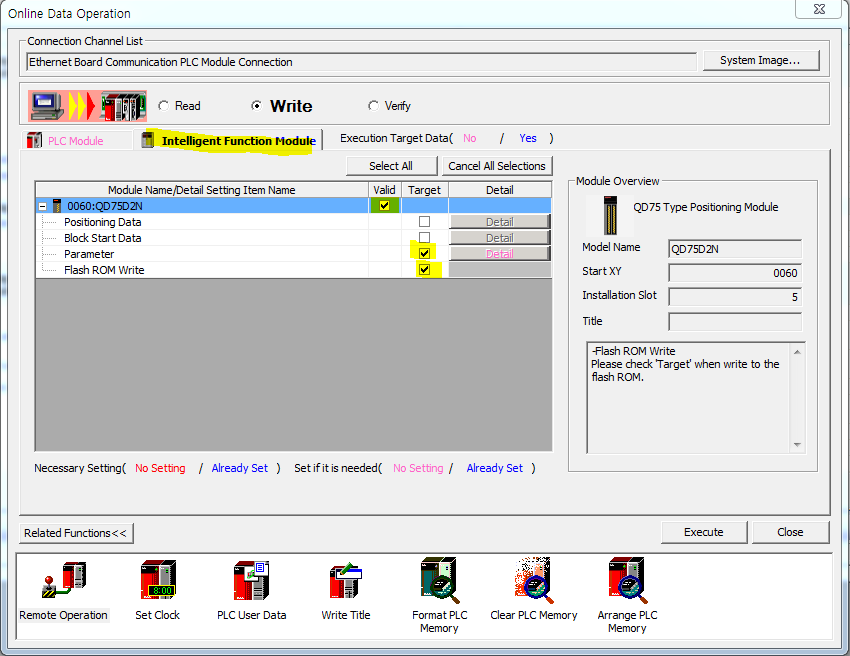
Operation
설정 후 PLC CPU 를 Stop 시키고
Online > Write to PLC > PLC Module 탭 옆에 Intelligent Function Module 탭 클릭
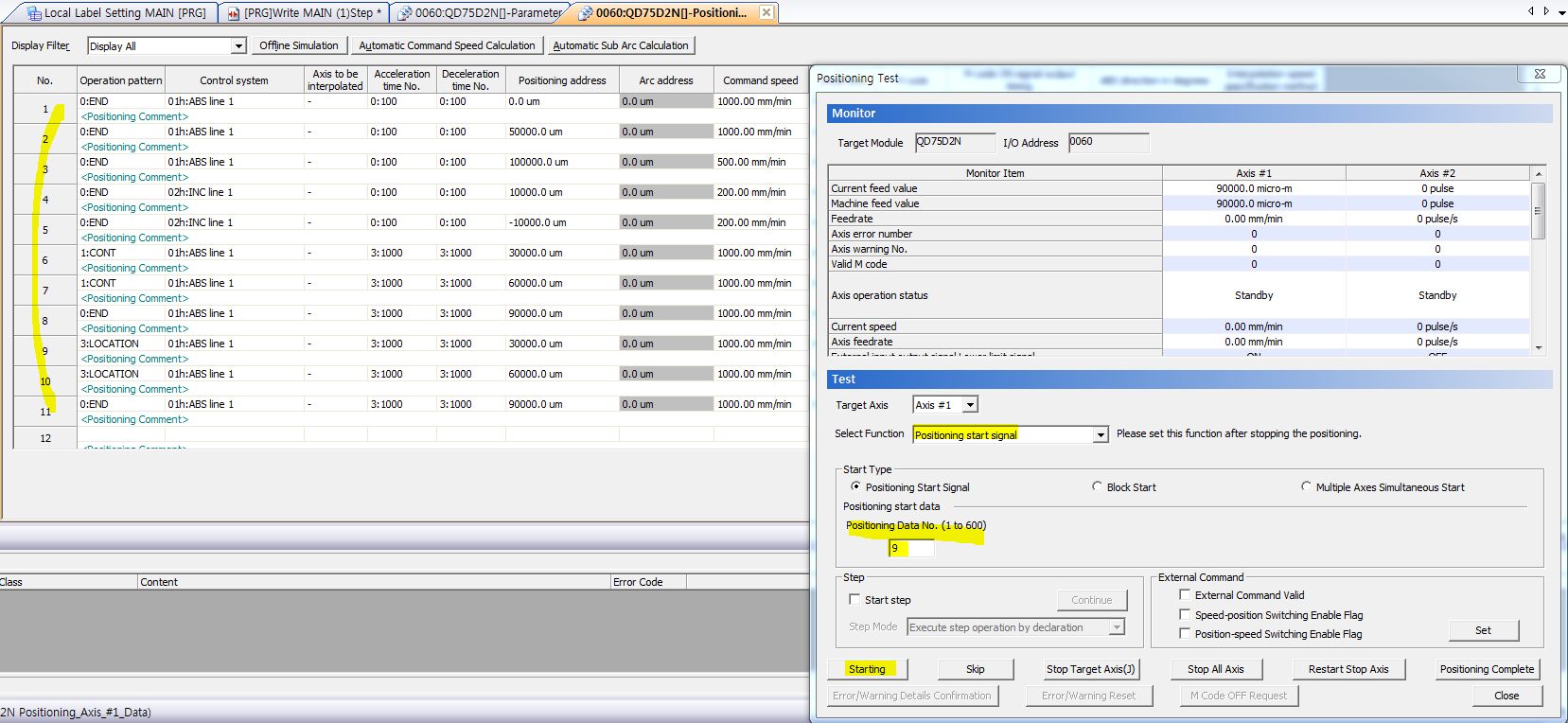
Positioning Test
Tool > Intelligent Function Module Tool > QD75/LC75 Positioning Module > Positioning Test
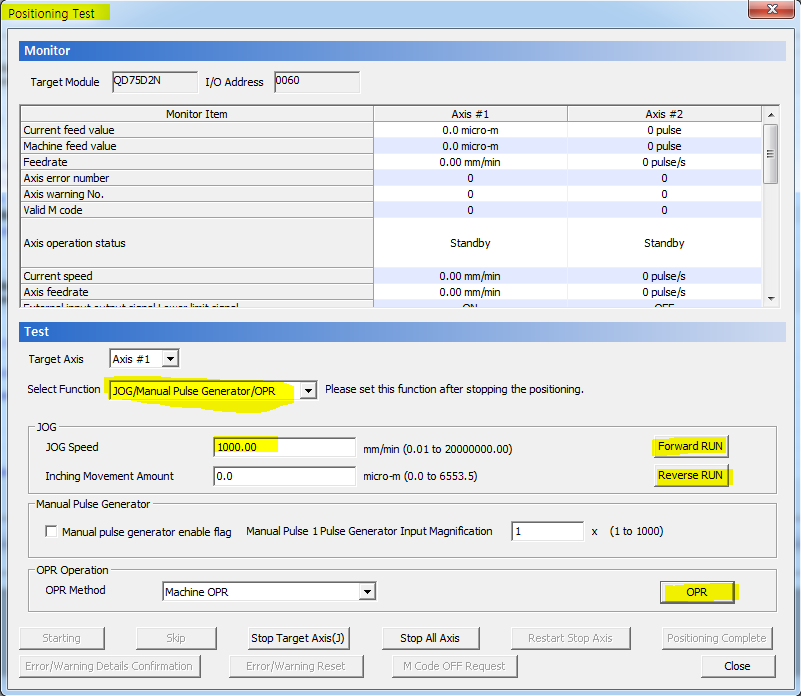
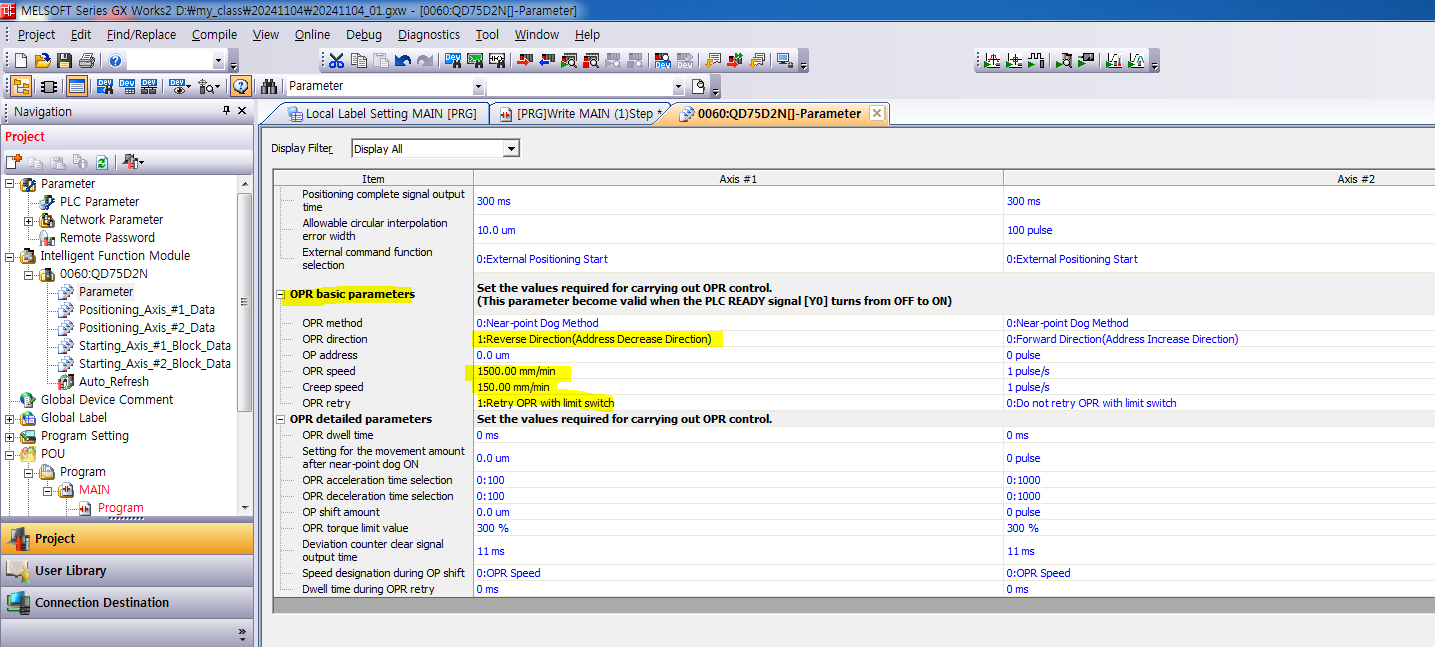
OPR 누르면 원점 복귀 (Parameter > OPR speed > “1:Retry OPR with limit switch”로 설정했기 때문)
Error / Warning
Error 또는 Warning 나오는 경우 내용 확인 해결 후 Reset
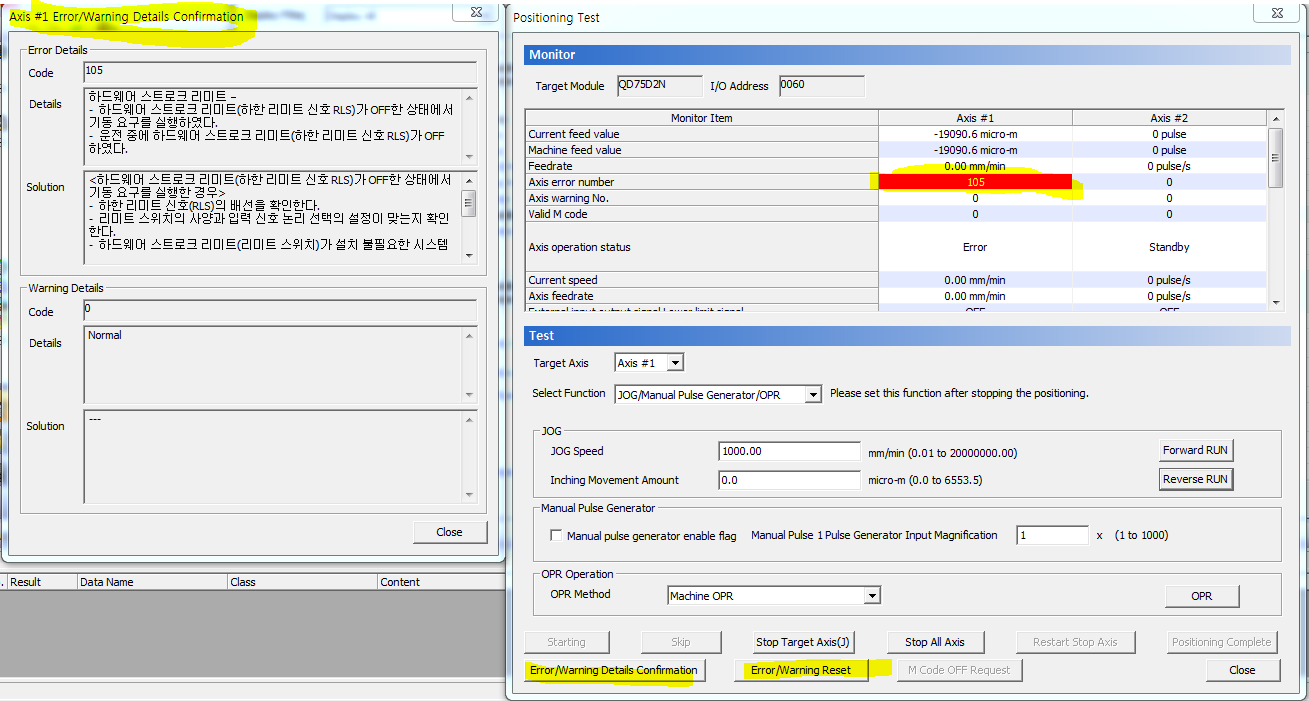
105 Error : 도그센서 지났을 때
102 Error : SON 버튼이 OFF 되었을 때
301 Warning : JOG Speed 가 내가 설정한 값보다 높을 때
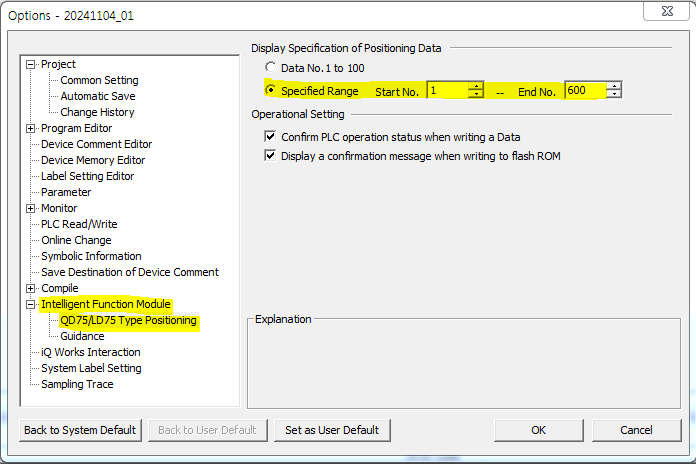
Specified Range 설정
Tool > Options > Intelligent Function Module > GD75/LD75 Type Positioning > Display Specification of Positioning Data
Positioning Test
가장 먼저 OPR 눌러서 원점 복귀하고 시작해야 함
Tool > Intelligent Function Module Tool > QD75/LC75 Positioning Module > Positioning Test
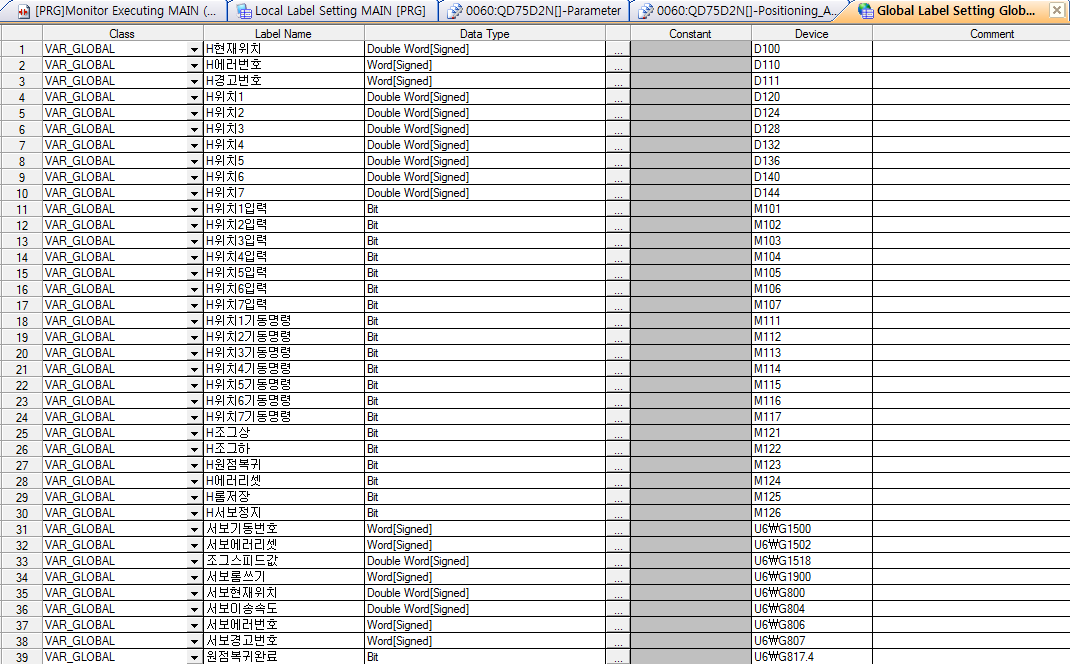
Glocal Label Setting

Remote Operation
Online > Remote Operation(S)…
Operation에서 라디오체크(RUN, STOP,..,RESET 등) 눌러서 Execute 하면 됨
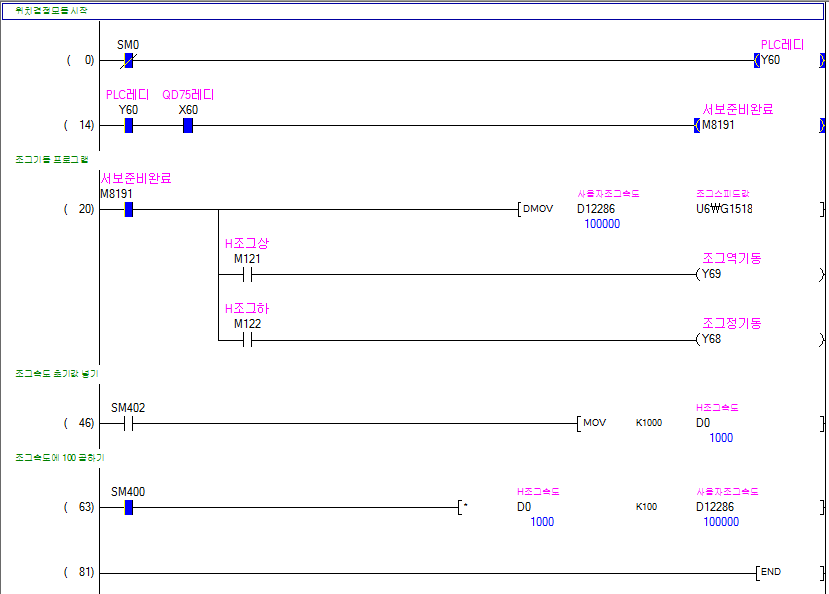
PLC & HMI 조그 상하
SM0 : 자기진단신호 (문제 없으면 0, 문제 있으면 1)
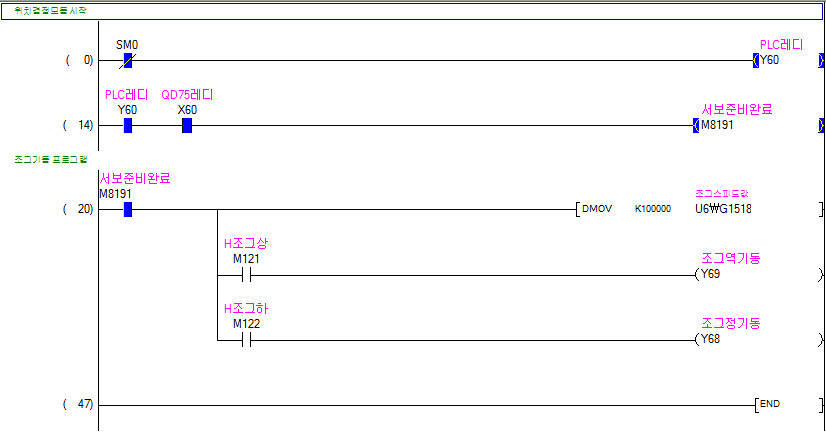
PLC & HMI 조그 상하 및 조그 속도 설정
Comments