ROS2 Gazebo & Cartographer & Navigation & 지도 저장 실행하기
![]()
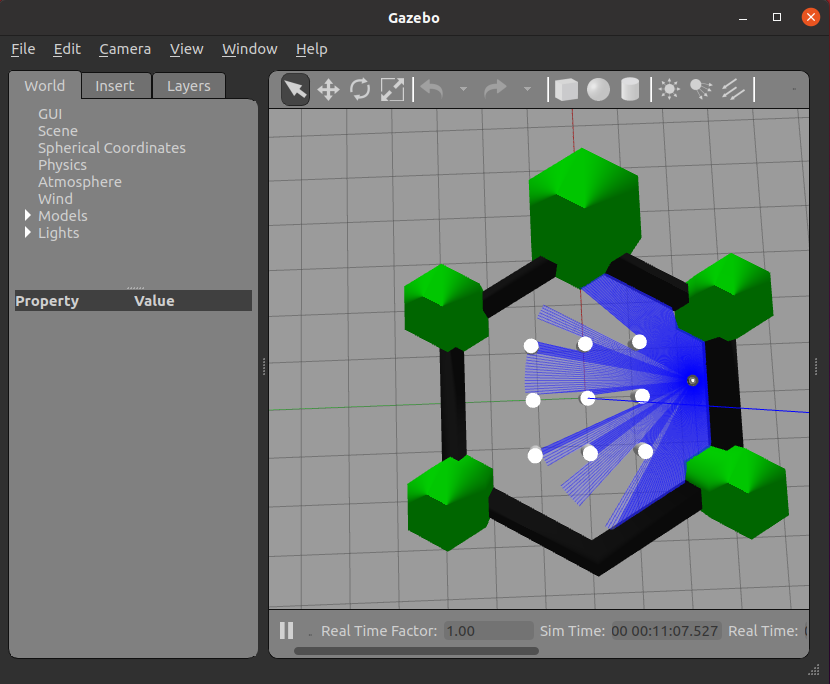
gazebo 시작
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
teleop keyboard 실행
ros2 run turtlebot3_teleop teleop_keyboard
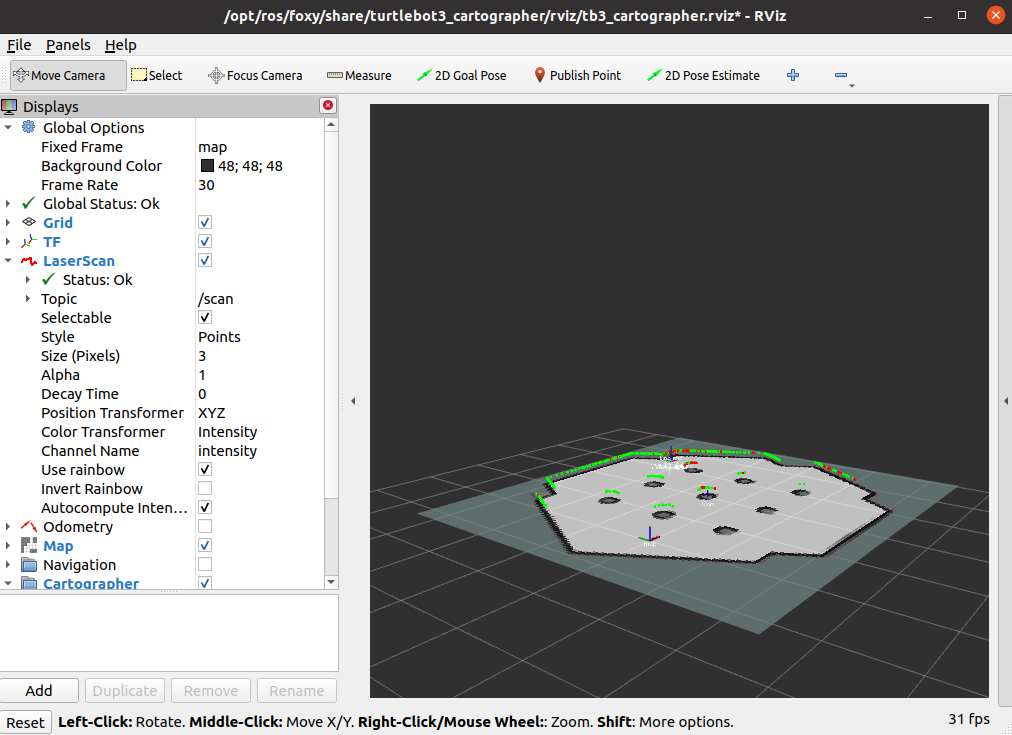
Cartographer SLAM 실행
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
Navigation 실행
ros2 launch turtlebot3_navigation2 navigation2.launch.py use_sim_time:=True map:=$HOME/map.yaml
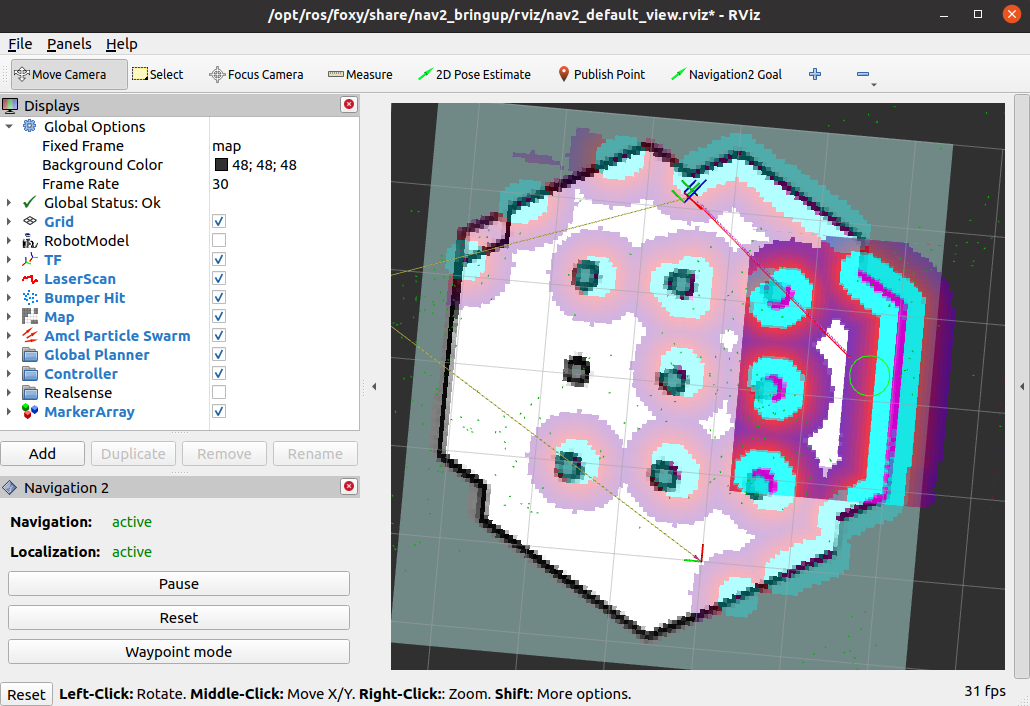
Cartographer SLAM 으로 occupancy grid map 지도를 만들었으면 키보드 제어 코드 끄고,
2D Pose Estimate 방향 맞춰서 드래그
Navigation2 Goal 로 드래그 하면 장애물 피해서 가는 것을 확인할 수 있음
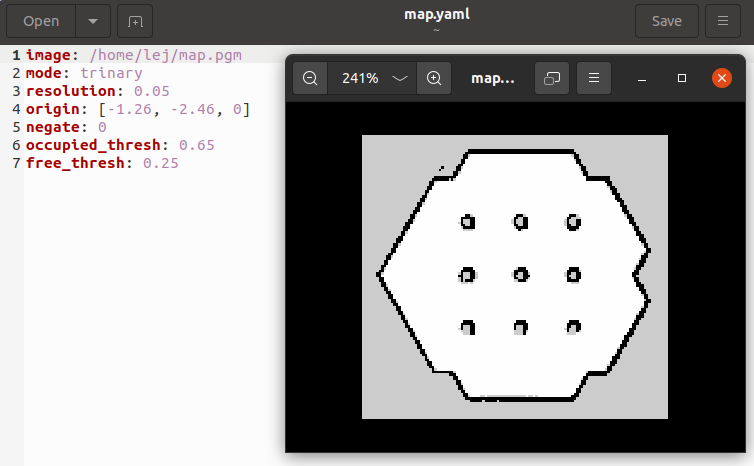
지도 저장
ros2 run nav2_map_server map_saver_cli -f ~/map
로보티즈 사이트
wayback machine 에서 로보티즈 사이트의 2024/03/09에서 알아낸 정보
딱히 안해도 됨
sudo apt install ros-foxy-cartographer
sudo apt install ros-foxy-cartographer-ros
sudo apt install ros-foxy-navigation2
sudo apt install ros-foxy-nav2-bringup
sudo apt install ros-foxy-dynamixel-sdk
sudo apt install ros-foxy-turtlebot3-msgs
sudo apt install ros-foxy-turtlebot3
source ~/.bashrc
Comments