Mac M1 UTM Ubuntu20.04(Foxy) ROS2 URDF Gazebo Study with Youtube
![]()
ROS2 URDF & Gazebo Study
참고 Youtube : Driving your virtual robot!
참고 Github
참고 Blog
sudo apt install ros-foxy-urdf-tutorial
cd ~
mkdir ros2_ws
cd ros2_ws
mkdir src
ros2 pkg create --build-type ament_python my_robot_urdf_study
cd my_robot_urdf_study
mkdir launch
mkdir urdf
mkdir config
mkdir worlds
일단 setup.py에 아래 4개를 맞는 위치에 추가한다
import os
from glob import glob
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'urdf'), glob('urdf/*.xacro')),
setup.py
import os
from glob import glob
from setuptools import setup
package_name = 'my_robot_urdf_study'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'urdf'), glob('urdf/*.xacro')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='power',
maintainer_email='power@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
],
},
)
cd urdf
touch robot.urdf.xacro
touch robot_core.xacro
touch inertial_macros.xacro
touch gazebo_control.xacro
robot.urdf.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="my_robot_urdf_study">
<xacro:include filename="robot_core.xacro" />
<xacro:include filename="gazebo_control.xacro" />
</robot>
robot_core.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- MACROS -->
<xacro:include filename="inertial_macros.xacro"/>
<!-- COLOR -->
<material name="white">
<color rgba="1 1 1 1" />
</material>
<material name="orange">
<color rgba="1 0.3 0.1 1"/>
</material>
<material name="blue">
<color rgba="0.2 0.2 1 1"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
<!-- BASE LINK -->
<link name="base_link">
</link>
<!-- CHASSIS LINK -->
<joint name="chassis_joint" type="fixed">
<parent link="base_link"/>
<child link="chassis"/>
<origin xyz="-0.1 0 0"/>
</joint>
<link name="chassis">
<visual>
<origin xyz="0.15 0 0.075"/>
<geometry>
<box size="0.3 0.3 0.15"/>
</geometry>
<material name="white"/>
</visual>
<collision>
<origin xyz="0.15 0 0.075"/>
<geometry>
<box size="0.3 0.3 0.15"/>
</geometry>
</collision>
<xacro:inertial_box mass="0.5" x="0.3" y="0.3" z="0.15">
<origin xyz="0.15 0 0.075" rpy="0 0 0"/>
</xacro:inertial_box>
</link>
<gazebo reference="chassis">
<material>Gazebo/White</material>
</gazebo>
<!-- LEFT WHEEL LINK -->
<joint name="left_wheel_joint" type="continuous">
<parent link="base_link"/>
<child link="left_wheel"/>
<origin xyz="0 0.175 0" rpy="-${pi/2} 0 0" />
<axis xyz="0 0 1"/>
</joint>
<link name="left_wheel">
<visual>
<geometry>
<cylinder radius="0.05" length="0.04"/>
</geometry>
<material name="blue"/>
</visual>
<collision>
<geometry>
<cylinder radius="0.05" length="0.04"/>
</geometry>
</collision>
<xacro:inertial_cylinder mass="0.1" length="0.04" radius="0.05">
<origin xyz="0 0 0" rpy="0 0 0"/>
</xacro:inertial_cylinder>
</link>
<gazebo reference="left_wheel">
<material>Gazebo/Blue</material>
</gazebo>
<!-- RIGHT WHEEL LINK -->
<joint name="right_wheel_joint" type="continuous">
<parent link="base_link"/>
<child link="right_wheel"/>
<origin xyz="0 -0.175 0" rpy="${pi/2} 0 0" />
<axis xyz="0 0 -1"/>
</joint>
<link name="right_wheel">
<visual>
<geometry>
<cylinder radius="0.05" length="0.04"/>
</geometry>
<material name="blue"/>
</visual>
<collision>
<geometry>
<cylinder radius="0.05" length="0.04"/>
</geometry>
</collision>
<xacro:inertial_cylinder mass="0.1" length="0.04" radius="0.05">
<origin xyz="0 0 0" rpy="0 0 0"/>
</xacro:inertial_cylinder>
</link>
<gazebo reference="right_wheel">
<material>Gazebo/Blue</material>
</gazebo>
<!-- CASTER WHEEL LINK -->
<joint name="caster_wheel_joint" type="fixed">
<parent link="chassis"/>
<child link="caster_wheel"/>
<origin xyz="0.24 0 0"/>
</joint>
<link name="caster_wheel">
<visual>
<geometry>
<sphere radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<geometry>
<sphere radius="0.05"/>
</geometry>
</collision>
<xacro:inertial_sphere mass="0.1" radius="0.05">
<origin xyz="0 0 0" rpy="0 0 0"/>
</xacro:inertial_sphere>
</link>
<gazebo reference="caster_wheel">
<material>Gazebo/Black</material>
<mu1 value="0.001"/>
<mu2 value="0.001"/>
</gazebo>
</robot>
inertial_macros.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" >
<!-- Specify some standard inertial calculations https://en.wikipedia.org/wiki/List_of_moments_of_inertia -->
<!-- These make use of xacro's mathematical functionality -->
<xacro:macro name="inertial_sphere" params="mass radius *origin">
<inertial>
<xacro:insert_block name="origin"/>
<mass value="${mass}" />
<inertia ixx="${(2/5) * mass * (radius*radius)}" ixy="0.0" ixz="0.0"
iyy="${(2/5) * mass * (radius*radius)}" iyz="0.0"
izz="${(2/5) * mass * (radius*radius)}" />
</inertial>
</xacro:macro>
<xacro:macro name="inertial_box" params="mass x y z *origin">
<inertial>
<xacro:insert_block name="origin"/>
<mass value="${mass}" />
<inertia ixx="${(1/12) * mass * (y*y+z*z)}" ixy="0.0" ixz="0.0"
iyy="${(1/12) * mass * (x*x+z*z)}" iyz="0.0"
izz="${(1/12) * mass * (x*x+y*y)}" />
</inertial>
</xacro:macro>
<xacro:macro name="inertial_cylinder" params="mass length radius *origin">
<inertial>
<xacro:insert_block name="origin"/>
<mass value="${mass}" />
<inertia ixx="${(1/12) * mass * (3*radius*radius + length*length)}" ixy="0.0" ixz="0.0"
iyy="${(1/12) * mass * (3*radius*radius + length*length)}" iyz="0.0"
izz="${(1/2) * mass * (radius*radius)}" />
</inertial>
</xacro:macro>
</robot>
gazebo_control.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<gazebo>
<plugin name="diff_drive" filename="libgazebo_ros_diff_drive.so">
<!-- Wheel Information -->
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<wheel_separation>0.35</wheel_separation>
<wheel_diameter>0.1</wheel_diameter>
<!-- Limits -->
<max_wheel_torque>200</max_wheel_torque>
<max_wheel_acceleration>10.0</max_wheel_acceleration>
<!-- Output -->
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_link</robot_base_frame>
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>true</publish_wheel_tf>
</plugin>
</gazebo>
</robot>
cd ..
cd launch
touch rsp.launch.py
touch launch_sim.launch.py
rsp.launch.py
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.substitutions import LaunchConfiguration
from launch.actions import DeclareLaunchArgument
from launch_ros.actions import Node
import xacro
def generate_launch_description():
# Check if we're told to use sim time
use_sim_time = LaunchConfiguration('use_sim_time')
# Process the URDF file
pkg_path = os.path.join(get_package_share_directory('my_robot_urdf_study'))
xacro_file = os.path.join(pkg_path,'urdf','robot.urdf.xacro')
robot_description_config = xacro.process_file(xacro_file)
# Create a robot_state_publisher node
params = {'robot_description': robot_description_config.toxml(), 'use_sim_time': use_sim_time}
node_robot_state_publisher = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
output='screen',
parameters=[params]
)
# Launch!
return LaunchDescription([
DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Use sim time if true'),
node_robot_state_publisher
])
launch_sim.launch.py
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
def generate_launch_description():
# Include the robot_state_publisher launch file, provided by our own package. Force sim time to be enabled
# !!! MAKE SURE YOU SET THE PACKAGE NAME CORRECTLY !!!
package_name='my_robot_urdf_study' #<--- CHANGE ME
rsp = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory(package_name),'launch','rsp.launch.py'
)]), launch_arguments={'use_sim_time': 'true'}.items()
)
# Include the Gazebo launch file, provided by the gazebo_ros package
gazebo = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('gazebo_ros'), 'launch', 'gazebo.launch.py')]),
)
# Run the spawner node from the gazebo_ros package. The entity name doesn't really matter if you only have a single robot.
spawn_entity = Node(package='gazebo_ros', executable='spawn_entity.py',
arguments=['-topic', 'robot_description',
'-entity', 'my_bot'],
output='screen')
# Launch them all!
return LaunchDescription([
rsp,
gazebo,
spawn_entity,
])
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
1번 터미널에서
ros2 launch my_robot_urdf_study rsp.launch.py use_sim_time:=true
2번 터미널에서
ros2 launch gazebo_ros gazebo.launch.py
3번 터미널에서
ros2 run gazebo_ros spawn_entity.py -topic robot_description -entity bot_name
다 종료하고, 1번 터미널에서
ros2 launch my_robot_urdf_study launch_sim.launch.py
2번 터미널에서
ros2 run teleop_twist_keyboard teleop_twist_keyboard
3번 터미널에서
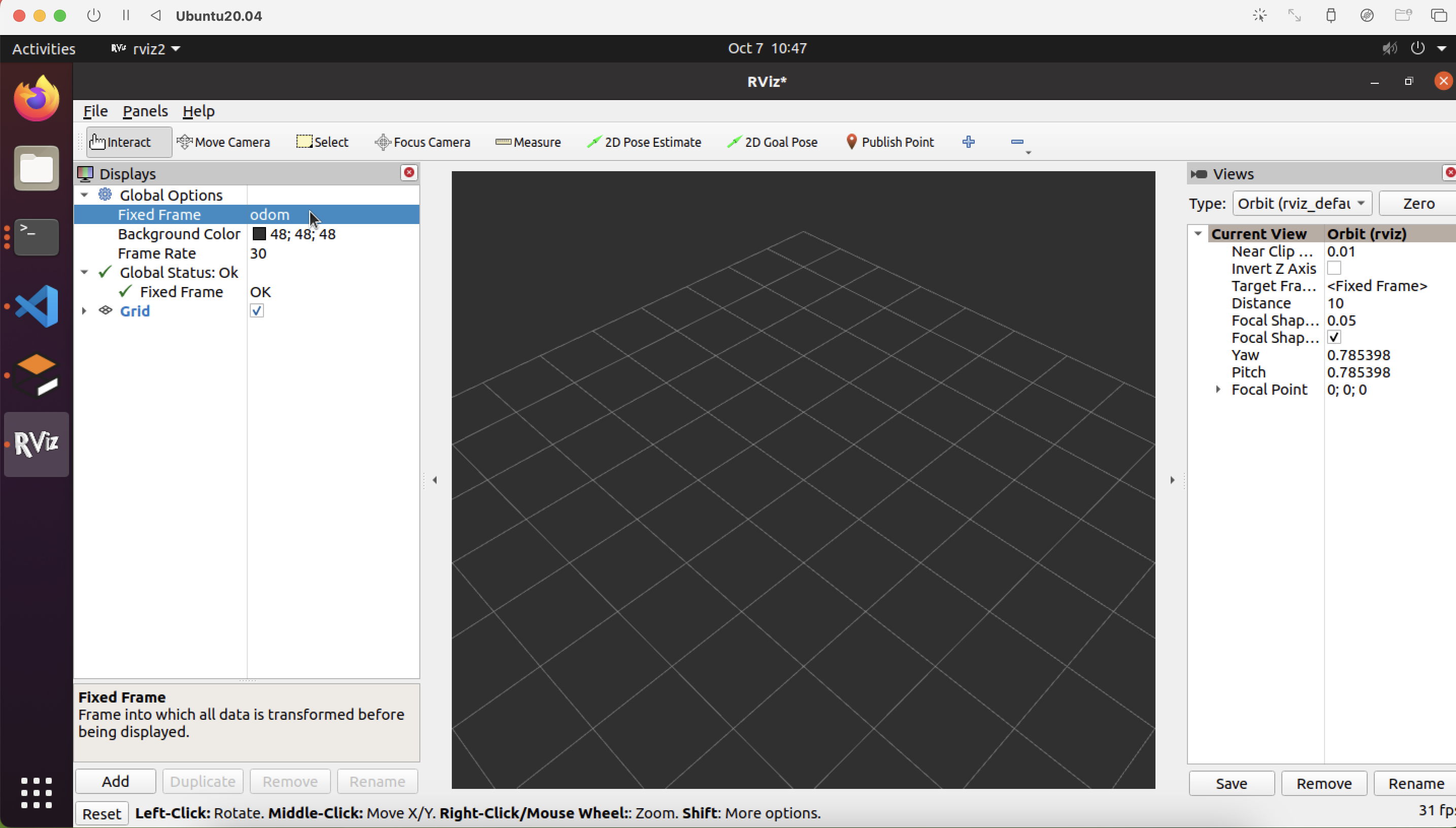
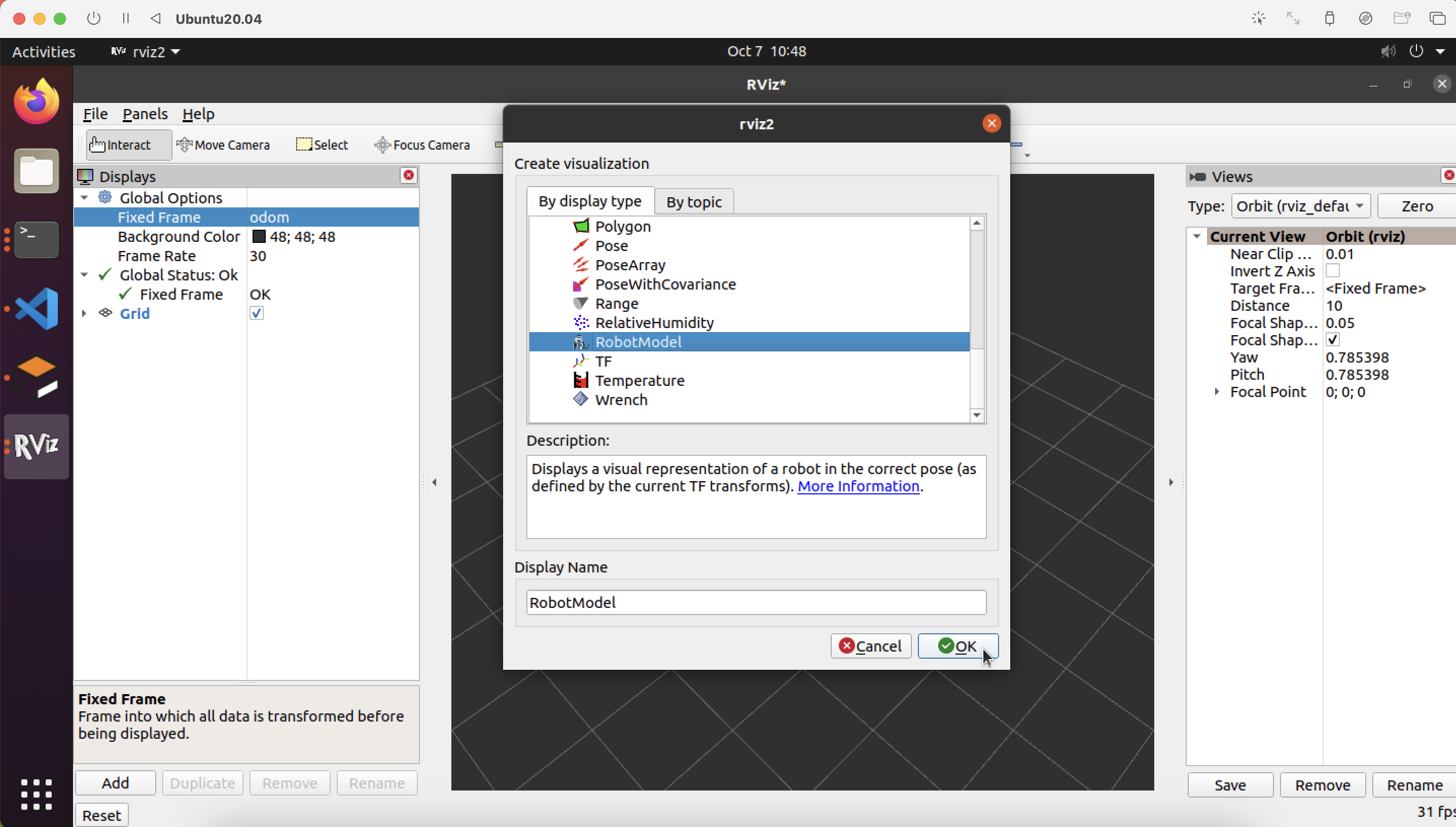
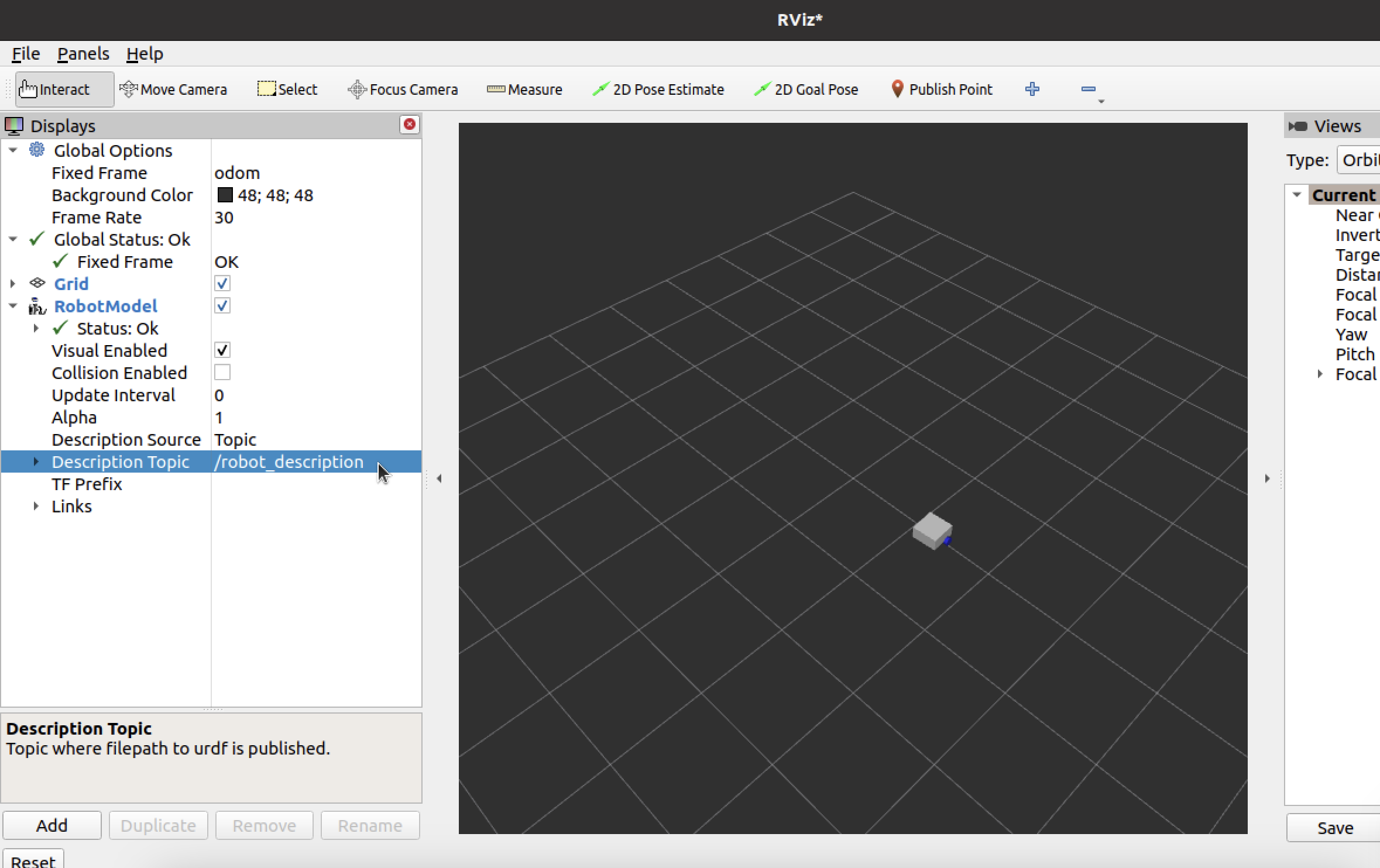
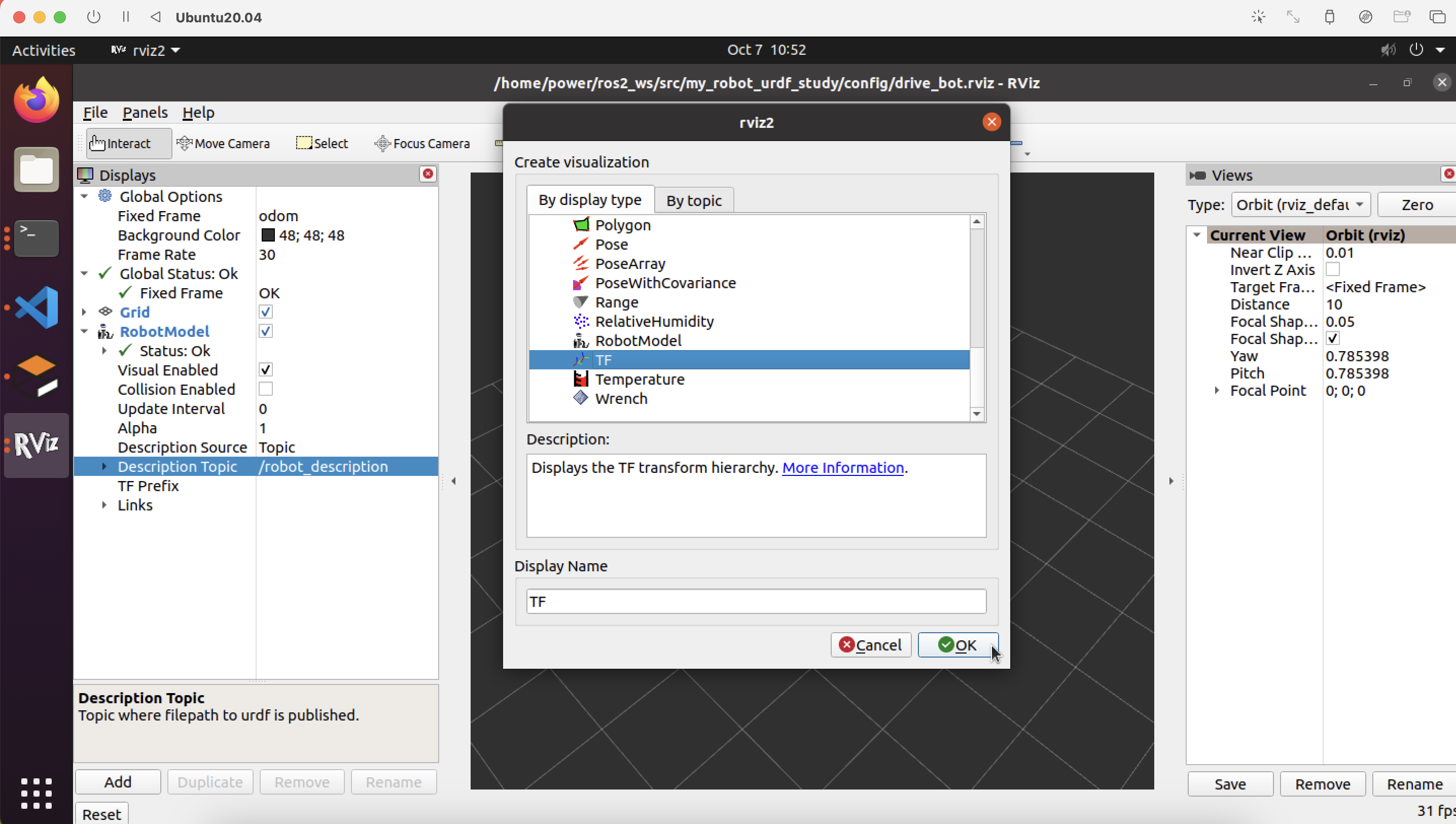
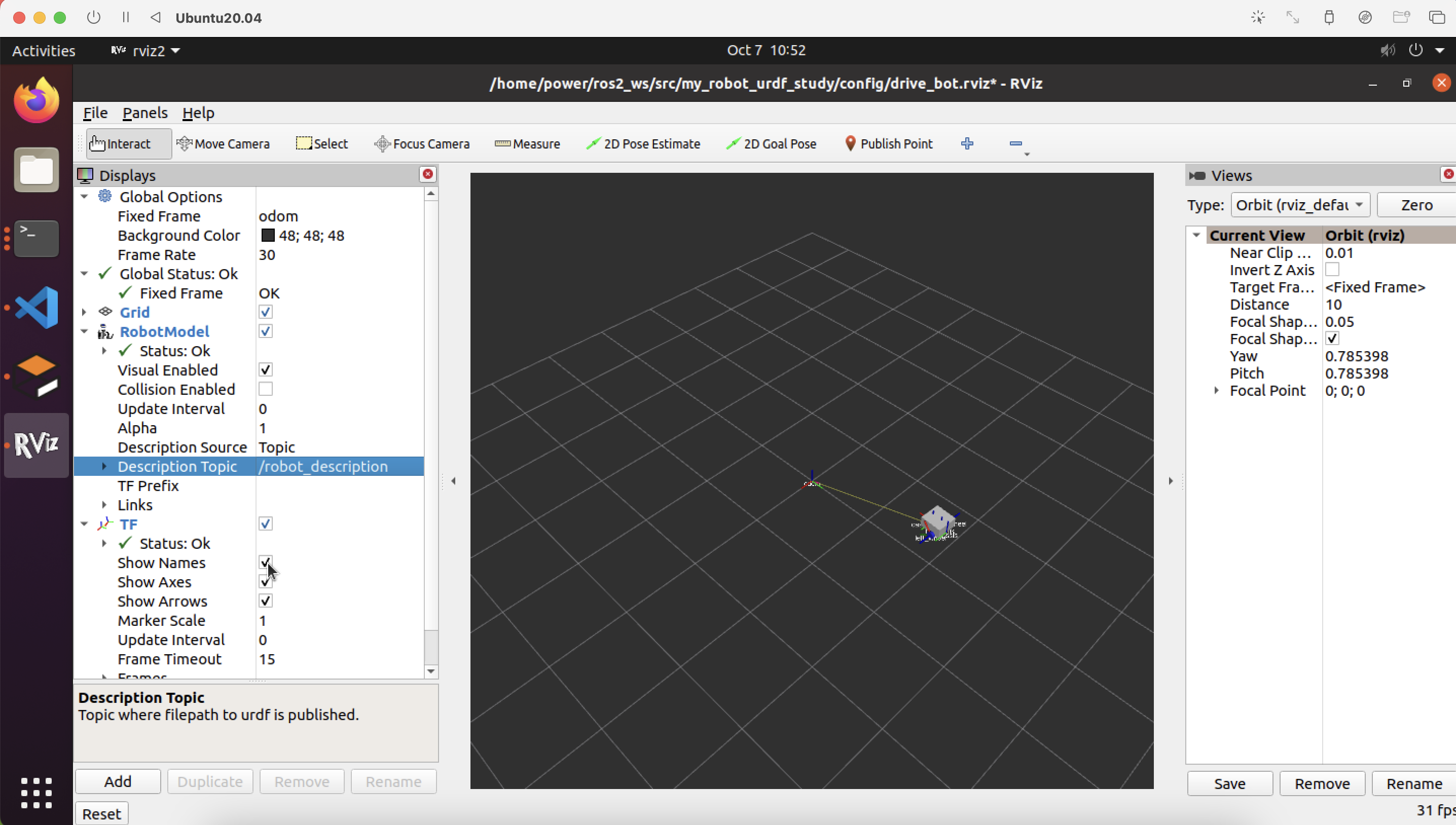
rviz2
4번 터미널에서
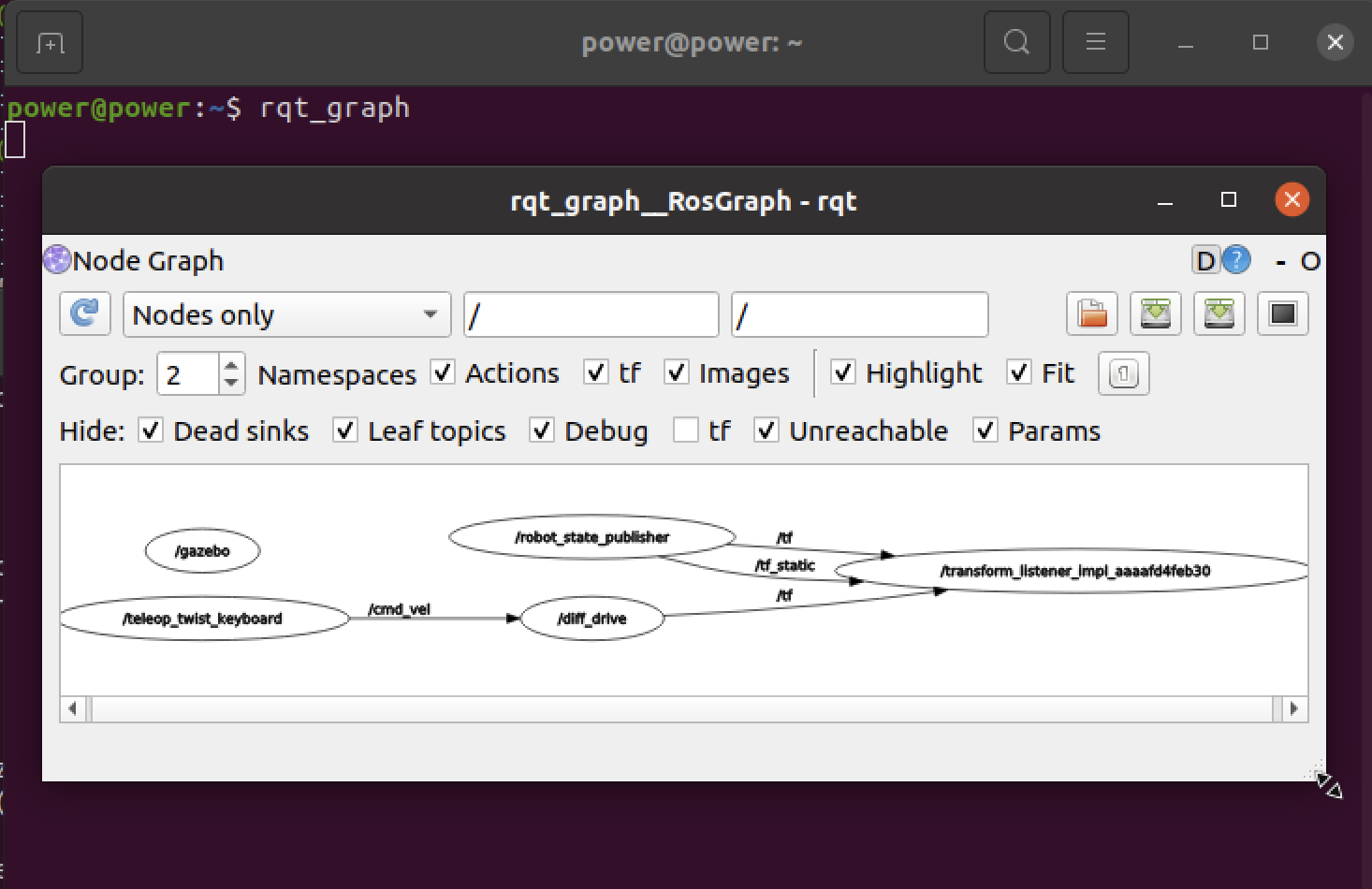
rqt_graph
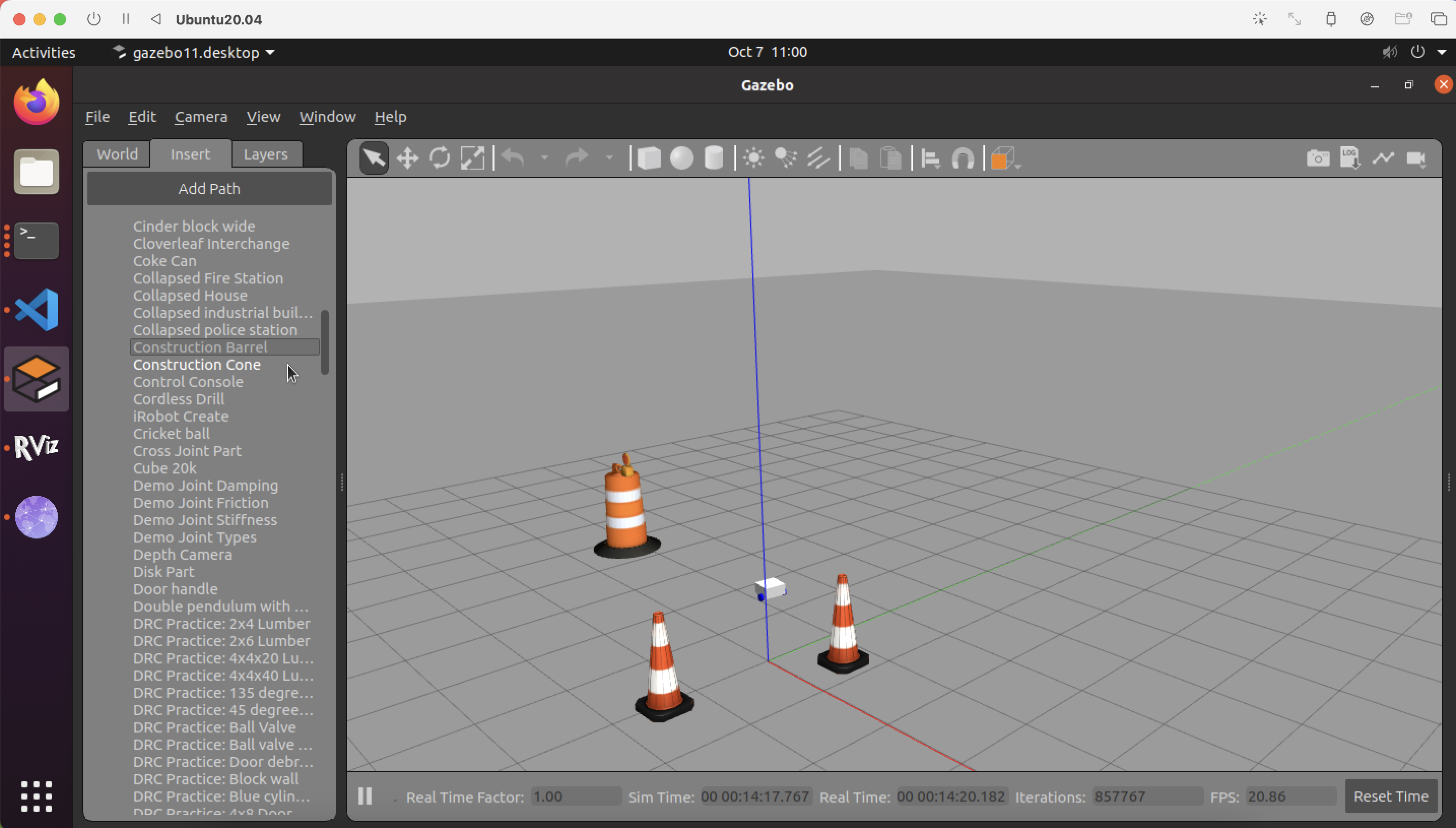
gazebo에서 world 꾸미기
gazebo world를 worlds 폴더 밑에 obstacles.world 라는 파일명으로 저장하면
(파일명은 자유롭게)
ros2 launch my_robot_urdf_study launch_sim.launch.py world:=./src/my_robot_urdf_study/worlds/obstacles.world
라고 하면 꾸민 배경에서 gazebo를 켤 수 있다.
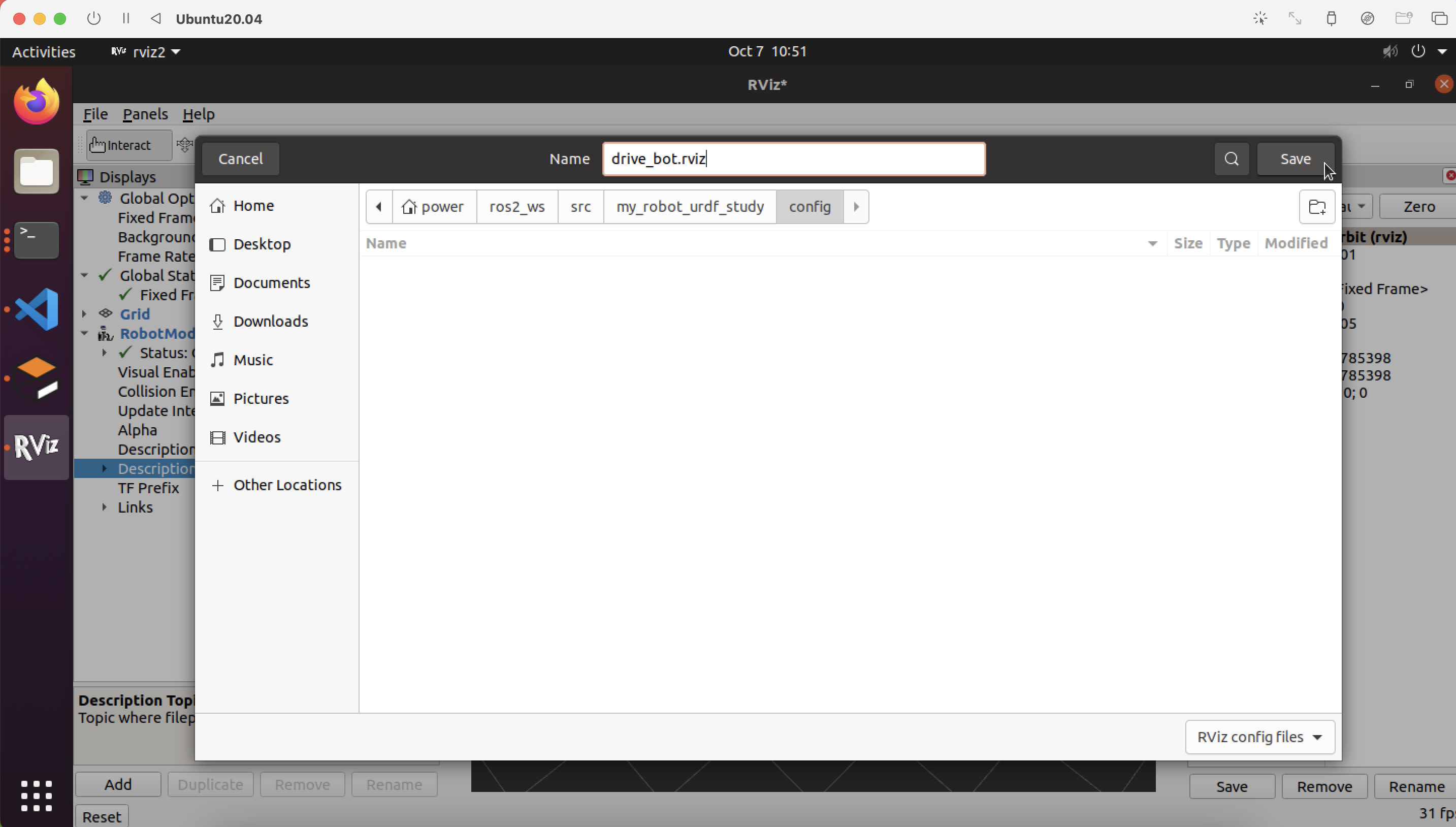
근데 나는 저장이 안되네;;;
Comments